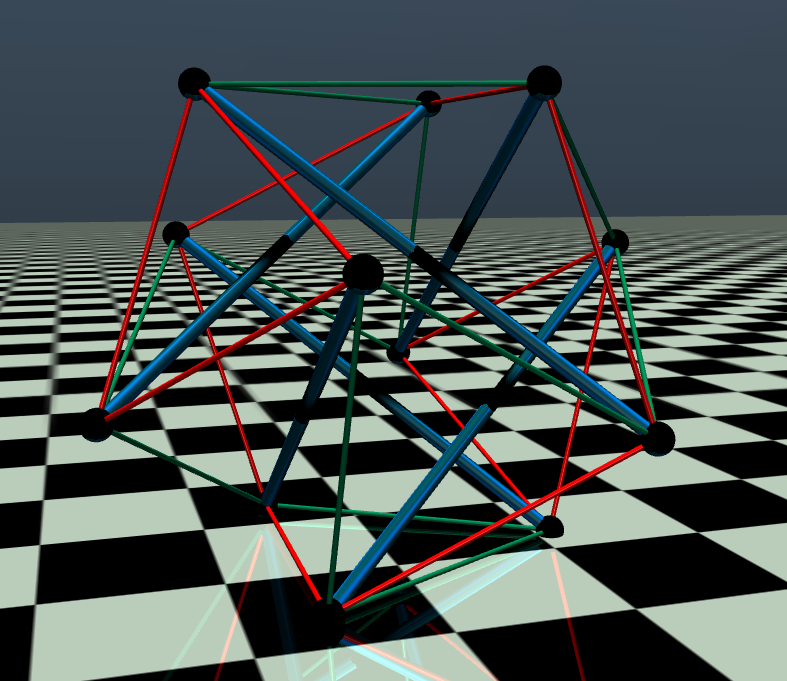
The purpose of the invention is an algorithm that would learn how to control the movement of a robot of an unknown structure in the desired direction. For the tests, a robot Tensegrity is chosen in a simulation environment MuJoCo. The robot consists of 6 rods that are connected using wires. The shape of the robot is changed with the help of twelve controlled wires. The simulator gives the coordinates of the centre of mass of the robot, the lengths of the cables.
Currently 2 algorithms are created. The first one uses two neural networks. One is designed to detect robot movements. It is called an actor. Another is trying to measure the goodness of the movements. It is called critic. According to the critic’s evaluation, the actor’s parameters are changed until the best result of the movement is obtained. The second algorithm is based on evolutionary methods. An attempt is made to discover the parameters of the neural network with which the best result is obtained. Algorithms are created using Python programming language. The communication with the simulator takes place via OpenAI Gym environment.
Usage – the creation of a fast robotic movement controller that is able to adapt to the changed environment.
Duration:
2018 - 2018



